智能传感器
1. 高速相机
智能加速团队长期从事实时高速视觉系统的开发,包括多个先端高速相机功能的开发,同时探索实时高速视觉在医疗、机器人、工业等领域的应用前景,积累了丰富的视觉算法研发及设备开发经验,相关的工作有:
(a)参与开发了世界领先的实时高速视觉平台IDP Express,并以此为基础开发了多个基于实时高速视觉系统的设备。开发了微流路中快速流动细胞的追踪测速及计数系统(2000帧/秒),开发了微流路中快速流动细胞的快速形态学统计分析系统(4000帧/秒),开发了针对显微视场的基于间歇性追踪技术的去运动模糊相机(1000帧/秒)、开发了显微视场中的高精度宽流量计测范围的全画幅光流设备(1000帧/秒)、开发了高速实时图像拼接系统(500帧/秒)等。在开发过程中,积累了微流路中细胞特性研究、硬件高速图像处理及毫秒级反馈控制方面的丰富经验。
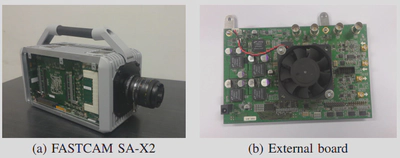
(b)参与开发了世界最先进的实时高速视觉平台Photron SA-X2。该相机可以以1024×1024@12000帧/秒的速度进行实时图像捕获及硬件图像处理,是世界上最快速的实时面阵高速相机,如图24所示。本团队主要负责实时硬件图像处理算法的设计及实现。掌握了追踪目标ROI快速更新技术(0.1 ms级别),开发了超高速运动目标追踪追踪系统(12000帧/秒)、掌握了实时模糊度计算(0.1 ms级别)技术、开发了复杂背景下的超高速目标探测及识别系统(12000帧/秒)等,如图1所示,为本项目的实施奠定良好基础。
2. 虚拟相机阵列
自主开发了多款虚拟相机阵列技术原型机,可用于远距离高速目标追踪及高价值目标搜索。


3. 线激光相机
4. 结构光相机
